Official Pytorch implementation for “FMFNet: Improve the 3D Object Detection and Tracking via Feature Map Flow” Paper [IJCNN-2022]
![]()
![]()
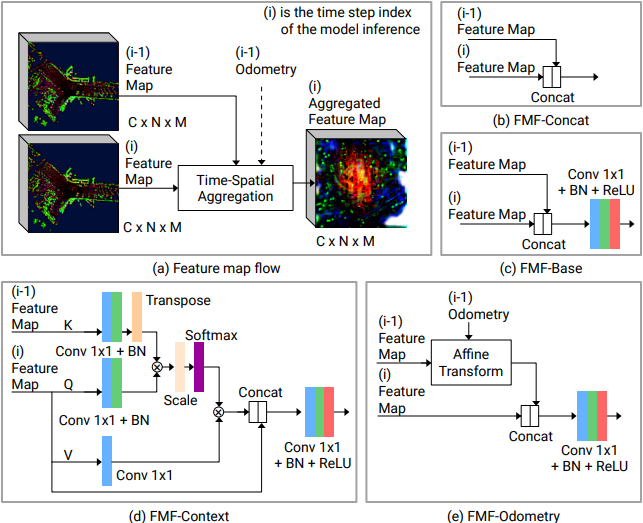
FMF main blocks:
FMF Demo:
News
[03-10-2022] FMFNet Paper is published on IEEE Xplore 🔥
[22-07-2022] FMFNet Poster is represented in the International Joint Conference on Neural Networks (IJCNN 2022).
[26-04-2022] FMFNet is accepted at IEEE WCCI (IJCNN) 2022 🔥
[20-05-2021] FMFNet team got the 5th rank in Real-time 3D detection challenge hosted by CVPR 2021 Workshop on Autonomous Driving (WAD) and a brief technical report was published in the proceddings of the workshop.
Abstract
Three-dimensional object detection and tracking from point clouds are important computer vision tasks for robots and vehicles where objects can be represented as 3D boxes. Improving the accuracy of understanding the environment is critical for successful autonomous driving. This paper presents a simple yet efficient method called “Feature Map Flow, FMF” for 3D object detection and tracking, considering time-spatial feature map aggregation from different timesteps of deep neural model inference. Several versions of the FMF are proposed: from common concatenation to context-based feature map fusion and odometry usage for previous feature map affine transform. The proposed approach significantly improves the quality of 3D detection and tracking baseline on the nuScenes and Waymo benchmarks. The software implementation of the proposed method has been carried out for the server platform and the NVidia Jetson AGX Xavier single-board computer. Its results have demonstrated high application prospects both for automated 3D point cloud labeling and for embedded on-board vehicle systems.
Main Results
3D detection on nuScenes test set
| Model | MAP ↑ | NDS ↑ | FPS ↑ |
|---|---|---|---|
| VoxelNet | 58.0 | 65.9 | 17 |
| PointPillars | 53.8 | 62.7 | 29 |
3D Tracking on nuScenes test set
| Model | AMOTA ↑ | IDS ↓ |
|---|---|---|
| VoxelNet | 61.2 | 870 |
| PointPillars | 58.1 | 736 |
3D detection on Waymo test set
| Model | Veh ↑ | Ped ↑ | Cyc ↑ | mAPH ↑ | Latency,ms |
|---|---|---|---|---|---|
| VoxelNet | 70.74 | 65.46 | 67.63 | 67.95 | 86.11 |
| PointPillars (FP16) | 69.65 | 54.61 | 62.28 | 62.18 | 62.30 |
3D detection on Waymo Val set
| Model | Veh ↑ | Ped ↑ | Cyc ↑ | mAPH ↑ | Latency,ms |
|---|---|---|---|---|---|
| VoxelNet | 66.68 | 63.62 | 68.64 | 65.98 | 86.11 |
| VoxelNet (FP16) | 66.68 | 63.06 | 67.24 | 65.85 | 77.53 |
| PointPillars | 62.35 | 59.67 | 66.71 | 62.43 | 82.06 |
| PointPillars (FP16) | 61.75 | 58.12 | 65.26 | 62.19 | 62.30 |
All results are tested on a RTX 3060 ti GPU with batch size 1.
Use FMFNet
Follow the provided steps to reproduce our results on nuScenes validation and test sets and get pretrained models.
Please refer to INSTALL to run the docker container for FMFNet. For training and testing on nuScenes, please follow the instructions in START. For WAYMO dataset, you can check START_WAYMO
Lisence
FMFNet is released under MIT license (see LICENSE). It is developed based on a forked version of CenterPoint. We also used code from det3d, CenterNet and CenterTrack.
Contact
Questions and suggestions are welcome!
Youshaa Murhij yosha[dot]morheg[at]phystech[dot]edu
Dmitry Yudin yudin[dot]da[at]mipt[dot]ru
Citation
If you find this project useful in your research, please consider citing our work:
@inproceedings{murhij2022fmfnet,
title={FMFNet: Improve the 3D Object Detection and Tracking via Feature Map Flow},
author={Murhij, Youshaa and Yudin, Dmitry},
booktitle={2022 International Joint Conference on Neural Networks (IJCNN)},
pages={1--8},
year={2022},
organization={IEEE}
}